بستن
0 محصول
مشاهده سبد خرید

اگر بر این باور هستید که ایدهی فرود عمودی راکتها ایدهای جدید است؛ از شما دعوت میکنیم با ما همراه شوید تا نگاهی به تاریخچهی این ایده داشته باشیم.
بسیاری از مردم بر این باور هستند که راکتهای دارای قابلیت فرود عمودی، پدیدهای جدید و حاصل تلاش دو شرکت اسپیسایکس و بلو اورجین هستند. اگر شما هم جزو این گروه از مردم هستید، باید بدانید که باور شما اشتباه است. در حقیقت، اگر نگاهی گذرا به تاریخچهی علوم موشکی و راکتهای فضایی داشته باشیم، خواهیم دانست که ایدهی فرود عمودی راکتها، ایدهی جدیدی نیست؛ در حقیقت، سابقهای این ایده به حدود ۶۰ سال پیش بازمیگردد.
طی کردن موفقیتآمیز فرایند برخاست تا فرود عمودی یک راکت، نیازمند این است که تکنولوژیهای مختلف همچون قطعات پازل در کنار یکدیگر قرار بگیرند. راکت شما باید نیروی پیشرانش کافی برای برخاست در اختیار داشته باشد؛ در عین حال، لازم است تا سوخت کافی برای مراحل فرود نیز در مخازن راکت باقیمانده باشد. همچنین، باید بتوانید در مسیر بازگشت به زمین مجددا موتورهای راکت را روشن کنید؛ این در حالی است که در این مرحله راکت با سرعتی فراتر از سرعت صوت در حال پرواز است. همچنین، در مسیر بازگشت، حرکات راکت در جهتهای مختلف باید با دقت بالایی کنترل شده و اصلاح شوند؛ در غیر اینصورت امکان از کنترل خارج شدن راکت بسیار بالا خواهد بود.
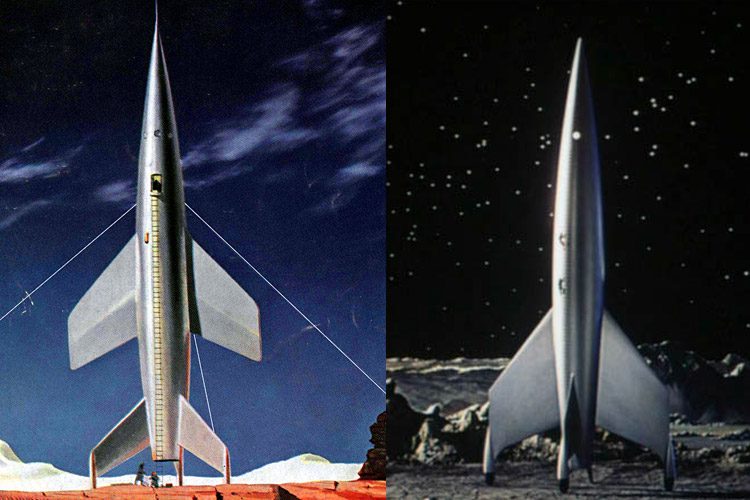
فرود عمودی راکتها در کتب و فیلمهای علمی-تخیلی
چالش دیگر این است که موتورهای موشک به طور پایه برای تولید نیروی پیشرانش بالا طراحی شدهاند؛ اما در مسیر بازگشت، نیروی پیشرانش ایجاد شده توسط موتورها باید به قدری کم باشد که بتواند فرود آرام راکت به سوی زمین را تضمین کند. علاوهبر این، به پایههایی برای فرود و مکانیزمی جهت باز شدن این پایهها نیاز خواهید داشت.
از اوایل دههی ۳۰ میلادی، تصاویر راکتهایی که بهصورت عمودی و روی دمشان فرود آمده بودند در کتابهای علمی-تخیلی دیده میشد. اما فناوریهای لازم جهت فرود عمودی سهدهه بعد و در دههی ۶۰ میلادی به مرحلهای رسیدند که امکان ساخت چنین راکتهایی وجود داشته باشد؛ البته باید گفت که فرود عمودی راکتها در دههی شصت چندان شبیه به فرود راکتهایی همچون فالکون ۹ نبود.

شخصی در حال استفاده از کمربند راکتی بل
اولین نمونه از فرود و نشست عمودی با یک راکت در سال ۱۹۶۱ و توسط وسیلهای موسوم به «کمبرند راکتی بل» انجام شد. هرچندالکساندر آندریوف از روسیه، در سال ۱۹۱۹ اختراع اولین وسیلهی پرواز راکتی را به نام خود به ثبت رسانده بود و پس از آن نیز افراد مختلفی دست به ساخت کولهپشتیهای پرنده زده بودند؛ اما شرکت آمریکایی بل (Bell) کار روی کمبرند راکتی را از دههی ۵۰ و با هدف فروش به ارتش ایالات متحده شروع کرده بود.
کمبرند راکتی بل از موتوری با سوخت هیدروژن پروکسید استفاده میکرد؛ اما ۱۹ لیتر سوختی که در مخزن این وسیله ذخیره میشد؛ تنها امکان پرواز به مدت ۲۱ ثانیه و طی مسافتی ۱۲۰ متری را فراهم میکرد. با این وجود، چنین اختراعی بسیار مورد توجه عموم قرار گرفت و حتی در یکی از فیلمهای جیمز باند نیز به نمایش گذاشته شد. اما محدود بودن مسافت طی شده با این کمبرند به ۱۲۰ متر، موجب ناخشنودی مقامات ارتش بود و آنها قرارداد مربوط به این پروژه را لغو کردند.
اما چند سال بعد، شاهد موفقیت چشمگیر وسیلهای بودیم که از موتورهای راکتی برای نشت و برخاست عمودی استفاده میکرد. این وسیله که کاملا در کار خود موفق بود و صدها میلیون نفر شاهد کارکرد آن بودند، چیزی نبود جز ماژول فرود پروژه آپولو. این ماژول در شرایط نامساعد ماه وظیفهی خود را طی ۶ ماموریت و بدون هیچ مشکلی به انجام رساند. البته کارکرد ماژول فرود پروژهی آپولو برعکس راکتهایی همچون فالکون ۹ است؛ چرا که این ماژول ابتدا روی سطح ماه فرود میآمد و سپس، بخش فرود که در حقیقت قطعهای از ماژول فرود بود، عملیات برخاست را به انجام میرساند تا سرنشینان را به ماژول فرماندهی آپولو برسانند.
لحظهی برخاست مأموریت آپولو ۱۷ از سطح ماه
در عین حال، فرود عمودی روی ماه سادهتر از فرود عمودی روی زمین است؛ چرا که جاذبه در سطح ماه یکششم جاذبه در سطح زمین است. مبارزه با جاذبه چالشی ذاتی برای تمام راکتها است؛ اما اگر قرار باشد وسیلهای پیش از فرود روی یک سطح، بالای آن معلق بماند تا مکان مناسب فرود پیدا شود، کار بیش از پیش سخت خواهد بود. با این وجود، برخی از کارها در ماژول فرود آپولو به صورت خودکار انجام میشد؛ برای مثال، یک رادار فاصلهی ماژول فرود با سطح را تعیین میکرد و یک رایانه نیز وظیفهی کنترل موتور این وسیله را برعهده داشت. جالب اینجا است که در اولین فرود آپولو، سیستم رادار در زمان مناسب خاموش نشده بود؛ این مسئله باعث شد دادههای دریافتی توسط رایانهی ماژول فرود بیش از میزان قابلپذیرش توسط باشد. در نتیجهای این مشکل، نیل آرمسترانگ مجبور شد فرود را به صورت دستی انجام دهد.
خوشبختانه آرمسترانگ بارها و بارها تمرینات فرود دستی را روی نمونهی زمینیِ ماژول فرود انجام داده بود و با فرایند فرود دستی کاملا آشنا بود. آرمسترانگ تجربهی کنترل نمونهی زمینی ماژول فرود را همچون تجربهی حفظ تعادل یک بشقاب روی دستهی جارو توصیف کرده بود. جالبتر اینکه در یکی از تمرینات، یکی از رانشگرهای (Thruster) ماژول فرود، پس از خالی شدن سوخت، از کار افتاده بود؛ در این سانحه، آرمسترانگ چند ثانیه پیش از سقوط نمونهی زمینی ماژول فرود، به کمک صندلی پرّان از مهلکه گریخته بود و با استفاده از چتر نجات به سلامت فرود آمده بود.
سانحهی سقوط ماژول تمرینی آپولو و فرود آرمسترانگ با چتر
ابعاد و شکل کلی راکتها به گونهای است که باعث میشود فرود آنها کار سادهای نباشد. راکتها ابزارهایی بلند و باریک هستند و اساسا برای فرود، آنهم به شکل عمودی، طراحی نشدهاند. اما اولین راکت واقعی که توانست به صورت عمودی فرود بیاید، راکتی موسوم به Delta Clipper Experimental بود که به اختصار DC-X نامیده میشد و توسط شرکت مکدانل داگلاس طراحی و ساخته شده بود. در حقیقت، ایدهی راکتی تک مرحلهای که از قطعات تولید شده برای دیگر ابزارهای فضایی استفاده میکرد در سال ۱۹۸۵ و توسط مکس هانتر، مهندس ارشد سابق بخش سیستمهای فضایی مکدانل داگلاس ارائه شده بود. او از کسانی بود که از دههی ۶۰ به چنین طرحی میاندیشید؛ اما شرکت مکدانل داگلاس علاقهای نداشت تا با هزینهی خود این پروژهی آزمایشی را کلید بزند.
روز چهارشنبه ۱۵ام فوریهی ۱۹۸۹ (۲۶ بهمن ۱۳۶۷)، هانتر که از اعضای سازمان دفاع راهبردی ایالات متحده بود، با کمک جری پرنل، نویسنده و روزنامهنگار سرشناس آمریکایی و ژنرال دنیل گراهام، که یکی از مشاوران امنیتی رونالد ریگان بود توانستند ملاقاتی با دن کویل، معاون رئیسجمهور ایالات متحده ترتیب دهند. آنها توانستند کویل را متقاعد کنند که هرگونه سیستم دفاع فضایی، نیازمند ابزاری است که بتواند محمولههای لازم را با هزینهای کمتر و در زمانی کوتاهتر از شاتلهای فضایی جابهجا کند.
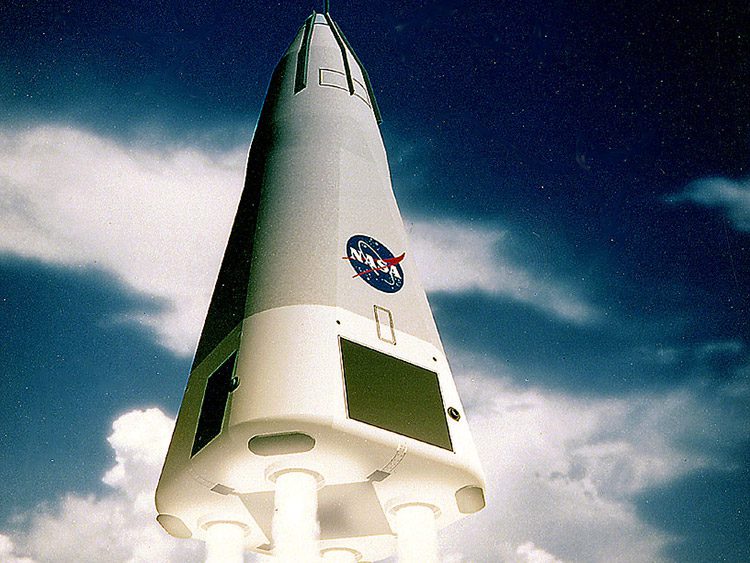
طرح راکت DC-X
با مورد پذیرش قرار گرفتن این ایده، پروژهی توسعهی راکتی با توانایی فرود عمودی تحت نظارت سازمان دفاع راهبردی شروع شد. قرار گرفتن این پروژه تحت نظارت سازمان دفاع راهبردی به معنی آزادی عمل بیشتر برای دستاندرکاران این پروژه بود؛ چرا که قرار نبود با پیچیدگیهای اداری موجود در ناسا و نیروی هوایی دست و پنجه نرم کنند.
تیمی که از حدود ۱۰۰ مهندس از شرکت مکدانل داگلاس تشکیل شده بود، توانستند در مدت ۲۱ ماه نمونهای آزمایشی از راکتی با قابلیت فرود عمودی را تولید کنند. این راکت آزمایشی که DC-X نامیده میشد، با یک سوم ابعاد نمونهی نهایی و با هدف اثبات تکنولوژی و انجام برخی بررسیها به تولید رسیده بود. هزینهی صرف شده برای ساخت این نمونه نیز تنها ۶۰ میلیون دلار بود. این راکت آزمایشی، مانند دیگر راکتها، بهصورت عمودی پرواز خود را شروع میکرد؛ اما برخلاف دیگر راکتها، به صورت عمودی فرود میآمد. برای فرود از پایههایی استفاده میشد که از قابلیت جمع شدن و باز شدن مجدد برخوردار بودند و نیاز به ابزارهایی همچون چتر سرعتگیر نیز وجود نداشت.
فرایند برخاست، تغییر مسیر و فرود راکت DC-X
نمونهی آزمایشی DC-X برای رسیدن به مدار زمین ساخته نشده بود و تنها تا ارتفاع ۲.۵ کیلومتری پرواز میکرد؛ اما همین مشخصات نیز برای اثبات تواناییهای این طرح مفهومی کفایت میکردند. بدنهی بیرونی این راکت از مواد کامپوزیتی ساخته شده بود و موتورهای آن نیز از نوع RL-10A بودند که در اصل برای راکتهای خانوادهی دلتا و اطلس مورد استفاده قرار میگرفت. ابزارهای کنترلی DC-X نیز از دیگر پروژهها و ابزارهای فضایی به عاریه گرفته شده بودند. اولین برنامهی آزمایشی DC-X از سال ۱۹۹۳ شروع شد و شامل سه پرواز آزمایشی میشد؛ اما با پایان برنامهی دفاع راهبردی، سرمایهگذاری روی این پروژه به پایان رسید.
پس از آن، ناسا بودجهی لازم برای این پروژه را تامین کرد و آزمایشات از سر گرفته شد. جالب اینجا است که در یکی از پروازهای آزمایشی، حفرهای در بدنهی راکت ایجاد شد، اما با این وجود، DC-X موفق شد بهطور موفقیتآمیز فرایند فرود خودکار را انجام دهد. پس از انجام تعمیرات، برنامهی آزمایشی در سال ۱۹۹۵ از سر گرفته شد؛ اما در این مرحله از آزمایشات، یکی از فرودهای راکت به خوبی انجام نشد و خسارت زیادی به پوستهی بیرونی راکت وارد آمد. لیکن این تنها خبر بد برای DC-X نبود؛ همزمان با آسیب دیدن پوستهی بیرونی راکت، تخصیص بودجه نیز به پایان رسید و این به معنی نبود پول کافی برای تعمیر راکت بود.
فرود ناموفق و انفجار راکت DC-X
در طول سال ۱۹۹۵، ناسا مجددا پذیرفت تا با توجه موفقیتهای پیشین در آزمایشات DC-X، پرداخت هزینههای این پروژه را بر عهده بگیرد؛ هرچند که مقامات ناسا این کار را با اکره انجام دادند و علاقهی زیادی به این طرح نداشتند. پس از چندین بهروزرسانی، این پروژه DC-XA نام گرفت؛ حرف A از ابتدای کلمهی Advanced به معنی «پیشرفته» گرفته شده بود. با انجام برخی بهروزرسانیها، پروازهای آزمایشی DC-XA در سال ۱۹۹۶ شروع شد. اما اینبار، پروژهی DC-XA باید با پروژهی مشابهی که توسط لاکهید مارتین اجرا میشد و X-33 نام داشت به رقابت میپرداخت. پروژهی X-33 به عنوان جایگزینی برای شاتلهای فضایی در نظر گرفته شده بود.
در نهایت، ناسا اعلام کرد که پروژهی DC-XA به دلیل محدودیتهای بودجهای به پایان میرسد؛ اما از نگاه بسیاری از افراد، توجه ناسا به طرح X-33 و بیعلاقهگی نسبت به پروژهی DC-XA موجب پایان یافتن این پروژه شده بود. شایان ذکر است که در آن زمان، هزینهی ساخت یک راکت DC-XA تنها ۵۰ میلیون دلار بود؛ این مبلغ در مقایسه با دیگر پروژههای موشکی بسیار ناچیز بود. اما در هر حال، ناسا تصمیم گرفت ۹۲۰ میلیون دلار برای پروژهی X-33 هزینه کند؛ هر چند این پروژه نیز در مراحل نهایی به دلیل مشکلات فنی مربوط به مخازن سوخت کامپوزیتی لغو شد و حتی پروازهای آزمایشی خود را هم به انجام نرساند. در ادامه میتوانید تصاویر بیشتری از DC-X را مشاهده کنید.




اگرچه پیش از فرارسیدن قرن بیست و یکم طرح DC-X به تاریخ پیوسته بود؛ اما این طرح الهامبخش بلوارجین برای ساخت راکت New Shepard بود. حتی برخی از مهندسین دستاندرکار در پروژهی DC-X نیز در بلو ارجین مشغول به کار شدند. امروزه، اثرات پروژهی DC-X بر طراحی فالکون ۹ نیز کاملا مشهود است. علاوه بر این، برخی از مهندسان ناسا معتقد هستند که طرح DC-X میتواند پایهی خوبی برای طراحی ابزاری جهت فرود روی مریخ باشد؛ چنین ابزاری میتواند حداکثر ۶ سرنشین را حمل کرده و به سطح مریخ برساند. موفقیتهای آزمایشات زمینی این پروژه، اثبات کردهاند که چنین کاری امکانپذیر است؛ علاوه بر این، به لطف جاذبهی کمتر در سطح مریخ، ظرفیت حمل محموله در مریخ فراتر از محمولهی حمل شده توسط DC-X در سطح زمین خواهد بود. حتی طراحی سیستم فرود اسپیسایکس، موسوم به Dragon، نیز شباهت زیادی به DC-X دارد.

موشک New Shepard شرکت Blue Origin
امروزه نیز دو شرکت بلو ارجین و اسپیسایکس از تکنیکهایی برای فرود عمودی راکتهایشان استفاده میکنند که بسیار شبیه به تکنیکهای فرود و هدایت DC-X است. شایان ذکر است که به لطف پیشرفتهای حاصل شده در زمینههای مختلف، از جمله طراحی راکتها، طرح کلی راکتهایی مانند فالکون ۹ نشاندهندهی پیشرفتهای چشمگیر در مقایسه با DC-X است. اما موفقیت طرحهایی همچون فالکون ۹، فراتر از مسائل فنی است؛ این طرحها ثابت کردهاند که از نظر اقتصادی، راکتهای قابل بازگشت ابزارهایی توجیهپذیر برای ارسال محمولهها به فضا هستند.
شباهتهای بسیار زیاد DC-X و راکتهای مدرنی مانند New Shepard و فالکون ۹ به این معنی نیست که چنین طرحهایی نوآورانه نیستند؛ حقیقت این است که دانشمندان همواره از دانستهها و اکتشافات پیشینیان کمک گرفتهاند تا پرواز پرندهی پیشرفت با توقف روبهرو نشود. این مهندسان مکدانل داگلاس بودند که امکانپذیر بودنِ فرود عمودی و هدایت دقیق راکتها در مسیر بازگشت را به اثبات رساندند؛ اما تبدیل این ایده به طرحی کاربردی، حاصل تلاش شرکتهایی مانند اسپیسایکس است.
