بستن
0 محصول
مشاهده سبد خرید
علت حضور رباتهای SPHERES در ایستگاه فضایی
کنترل کردن رباتها در فضا از روی زمین، درست مثل نشانهروی روی یک هدف متحرک بالاست. در رسیدن فرمان و دریافت اطلاعات، تأخیری 1 تا 3 ثانیهای وجود دارد که این کار را بسیار دشوار میکند. در حقیقت تحت این شرایط کاربر زمینی میبایست تمامی حرکات ربات را در طول این چند ثانیه پیشبینی کند تا بتواند ربات را به خوبی راهبری بکند و دستورات لازم را در زمان مناسب به ربات بدهد. این هفته شرکت Lockheed Martin که احتمالاً همهی شما با آن آشنایی دارید، سیستمی را معرفی کرده که در آن میتوان کنترل رباتهای حاضر در ایستگاه فضایی بینالمللی را در تعاملی مشترک بین فضانوردان ایستگاه و مرکز کنترل زمینی به دست گرفت.
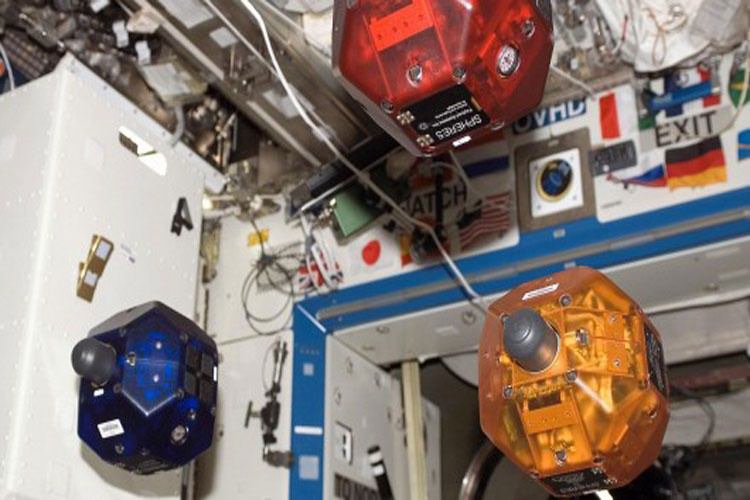
صرفاً برای اینکه حسی نسبت به این موضوع داشته باشید باید گفت که کنترل یک ربات در شرایط بی وزنی در ایستگاه فضایی یا فضای خارج بسیار دشوار است. به خصوص وقتی که نیاز به استفاده از ابزارهای دقیق باشد یا گازهای خروجی از سایر ماهوارهها نیز بر روی آن تأثیر بگذارند. یک راه برای جبران تأخیر زمان در چنین شرایطی، محولکردن اختیارات لازم به خود سامانه ربات یا کنترل آن از فضاست که فارغ از مباحث مربوط به HAL9000، به خودی خود بسیار دشوار است. Lockheed اما این بار به همراهی ناسا راه حل را در جای دیگری جستجو کرده اند؛ آنها از یک رابطکاربری دوگانه برای کنترل دوگانه از روی زمین و فضا –توسط فضانوردان- بهره بردهاند تا مشکلات مربوط به تأخیر زمانی را همراه با مشکل قدیمی دوتا شدن آشپز! همزمان حل کنند. آنها برای امتحان عملکرد این رابطکاربری از رباتهایی به نام کره (SPHERES) بهره بردهاند که میتواند درست مشابه با رباتها و ماهوارههای بدون سرنشین مانور بدهد. این رباتها که هر یک در ابعاد یک توپ فوتبال هستند، میتوانند خود را در فضا بچرخانند و در 3 جهت نیز آزادانه حرکت کنند. آنها میتوانند مسیر یکدیگر را دنبال کنند یا در یک فاصله از هم بمانند؛ عملکردهای مشابهی که در ماهوارهها کاربرد دارد.
در آزمایشهای اخیر فضانورد Karen Nyberg بر روی ایستگاه فضایی و مهندس Humberto Ormeno بر روی زمین، کنترل کرهها را با استفاده از رابطکاربری سه بعدی ATC در دست گرفتند تا عملیاتهایی را مشابه آن چه که در مأموریتهای فضایی از جمله مانورهای سفر به مریخ انجام دهند. برای مثال یکی از مانورهایی که انجام گرفت مانور دنبالکردن رهبر بود که در آن دو تا از رباتها میبایست یک ربات اصلی را به عنوان رهبر با حفظ فاصله دنبال میکردند. این عملیات به شکل مشابهی در سرهم بندی قطعات ساختارهای بزرگ فضایی در فضا کاربرد دارد.
به گفتهی Lockheed این سامانه از قابلیت انعطافپذیری خوبی نیز برخوردار است و میتوان یکی یا چندتا از رباتها را به صورت خودکار در آورد؛ در حالی که رباتهای دیگر در حالت کنترل دستی قرار دارند. به گفتهی آقای Andrew Zimdars سرپرست این تیم کنترل و رهبری رباتها در فضا نیاز به رابطکاربری کاملا شهودی و آگاهانه دارد تا بتوان با حسی کامل نسبت به حرکات، مانورهای فضایی را به درستترین شکل ممکن انجام داد. رباتهای کره آغازی خواهند بود بر همکاری فضانوردان با کنترل زمینی برای کنترل هرچه بهتر عملیاتهای فضایی و توسعه نرمافزارهایی بهینه برای کنترل خودکار و دوگانه برای پاسخگویی به نیازهای فضایی آینده، تا بتوان آنها را با دقتی هر چه بهتر به سرانجام رساند.
